
How to Connect AGV Wheels with Motors: A Step-by-Step Guide to Efficient Automation
Introduction :
Automated Guided Vehicles (AGVs) have revolutionized industries by streamlining material handling and logistics processes. One crucial aspect of AGV design is connecting the wheels with motors to ensure precise and efficient movement. In this article, we will explore the step-by-step process of connecting AGV wheels with motors to create a reliable and effective automated system.
Understand the AGV Requirements:
Before diving into the technical details, it is essential to understand the specific requirements of your AGV project. Consider factors such as load capacity, terrain, speed, and manoeuvrability. These requirements will guide you in selecting the appropriate motor and wheel size for your AGV.
Select the Right Motors:
Choosing the correct motor is critical for the successful operation of an AGV. Factors like torque, speed, voltage, and power consumption should be taken into account. DC motors and brushless DC (BLDC) motors are common choices for AGVs due to their efficiency and controllability.
Choose Suitable Wheels:
Selecting the right wheels is equally important. Various factors, such as wheel material, diameter, and traction, should be considered based on the AGV's application. Common wheel types include polyurethane, rubber, and metal.
Design the Mounting System:
The mounting system connects the motor to the AGV's chassis while providing flexibility for the wheel's movement. Ensure that the mounting system is robust, durable, and allows easy maintenance. 3D modeling and simulation software can aid in visualizing and refining the design.
Install Encoders (Optional):
For precise control and feedback, encoders can be attached to the motor shaft. These devices provide information about the wheel's position and speed, enabling accurate navigation and path correction for the AGV.
Wiring and Electrical Connections:
Follow the manufacturer's guidelines and best practices for wiring the motors to the AGV's control system. Properly secure and insulate the connections to prevent electrical issues that could lead to malfunctions.
Test and Calibration:
Once the wheels are connected to the motors and the electrical connections are complete, thoroughly test the AGV. Verify its movement, turning radius, and responsiveness to control commands. Calibrate the system to achieve optimum performance.
Implement Safety Measures:
AGVs operate in shared spaces with humans and other equipment. Incorporate safety features like proximity sensors, emergency stops, and obstacle detection systems to ensure the AGV can respond appropriately to its surroundings.
Connecting AGV wheels with motors is a critical step in creating an efficient and reliable automated system. By understanding the AGV's requirements, selecting suitable motors and wheels, designing a robust mounting system, and incorporating safety measures, you can develop an AGV capable of enhancing productivity and safety in various industries. The ongoing advancements in robotics and automation continue to open new possibilities for AGV technology, making it an exciting field for future innovation.
How to choose a motor for AGV Wheel ???
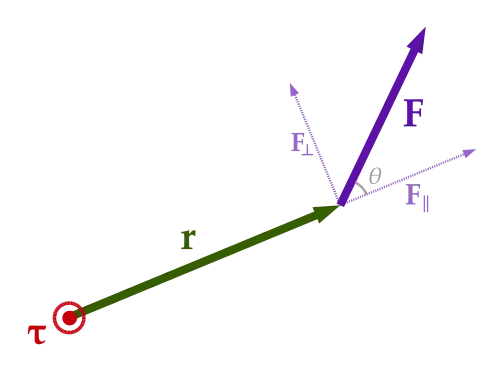
1. Torque Requirements:
Determine the amount of torque needed to move the AGV and its payload efficiently. The motor should be able to generate enough torque to overcome the rolling resistance and any obstacles the AGV may encounter.
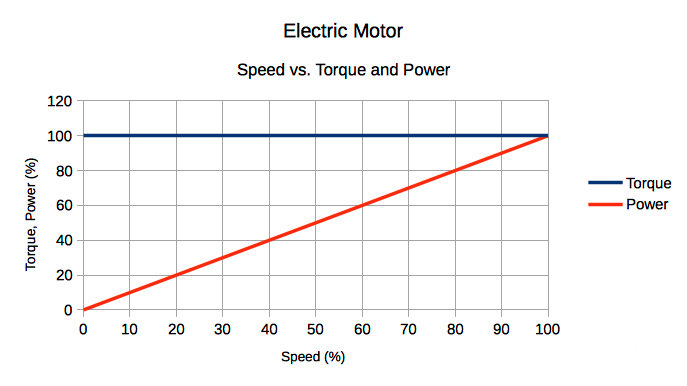
2. Speed Requirements:
Consider the desired speed of the AGV. The motor should be capable of achieving the required speed without sacrificing torque. Keep in mind that the speed may vary depending on the application and environment.

3. Wheel Size and Load Capacity:
The size and weight of the AGV wheels impact the motor selection. Larger wheels and heavier payloads may require motors with higher torque and power ratings.
3. Operating Voltage:
Choose a motor that operates at a voltage compatible with the AGV's power supply system. Common options include 12V, 24V, 48V, etc. Ensure that the chosen voltage is readily available and manageable for your specific application.
4. Motor Type:
The most common motor types for AGVs are DC motors and brushless DC (BLDC) motors. DC motors are cost-effective and straightforward, while BLDC motors offer better efficiency, longer life, and smoother operation. Consider the advantages and disadvantages of each motor type based on your AGV's requirements.
5. Control System Compatibility:
Ensure that the selected motor can be easily integrated into the AGV's control system. Check if it supports the required communication protocols and interfaces.
6. Encoder or Feedback:
Consider whether you need a motor with an encoder or feedback mechanism. Encoders provide position and speed feedback, enabling precise control and navigation. This is particularly important for AGVs that require high accuracy and path correction.

7. Environmental Conditions:
Evaluate the environmental conditions in which the AGV will operate. If the AGV will encounter dust, moisture, or other harsh conditions, choose a motor with appropriate protection (e.g., IP ratings) to ensure its durability and reliability.
8. Energy Efficiency:
Opt for motors that are energy-efficient to maximize battery life and reduce power consumption, especially for AGVs that need to operate for extended periods.
9. Cost and Availability:
Balance the motor's features and capabilities with your budget. Consider the motor's cost, availability, and maintenance requirements to make an informed decision.

10. Consult Manufacturers and Experts:
We SMD Gearbox provides you an expert advice to get perfect recommendation for selecting a product. By conducting thorough research and understanding the specific requirements of your AGV project, you can select a motor that optimizes performance and meets your application needs.
